Mi-am facut timp si am reusit sa ma ocup si eu de renumitul CET.
Tabelele modificate sunt cele din posturile lui Vali. Am sincronizat valorile RT-ului intre tabelele "cunoscute" si cele "noi" (cele 4 Calculated Engine Torque) avand ca valoare maxima o idee peste valoarea maxima vazuta in loguri pentru requested torque.
(Mentionez ca DBW, Requested Torque Base - este luata in calcul la determinarea torque-ului care va fi cerut in functie de apasarea pedalei - a ramas nemodificata).
Rezultate so far:
- pe pedala usoara masina a "pierdut" cuplu, nu mai e asa de jumpy, mai usor de condus prin oras - adaptand si requested torque base probabil se poate aduce inapoi la stilul zmuls; (vezi postul urmator)
- pe WOT in a 1-a si a 2-a: castig (!?) de putere
- pe WOT pe restul: trage mai... continuu dar clar mai slab
Am gasit si explicatia pentru "mai slab"-ul din 3-6: am facut greseala sa intru la creatie si la Requested torque limit per gear, unde l-am pus intre 440 (a 1-a) si 360 (a 6-a).
In poza de mai jos sunt suprapuse si sincronizate valorile RT-ului pentru un 1-4 mai vechi (albastru) si un 1-4 cu ultimele modificari (rosu). Intreruperile pe curba rosie sunt artificiale ca sa sincronizez inceputul si sfarsitul fiecarei viteze - curba rosie a fost cu FFS si pauzele intre viteze au fost mai scurte decat la cealalta...).
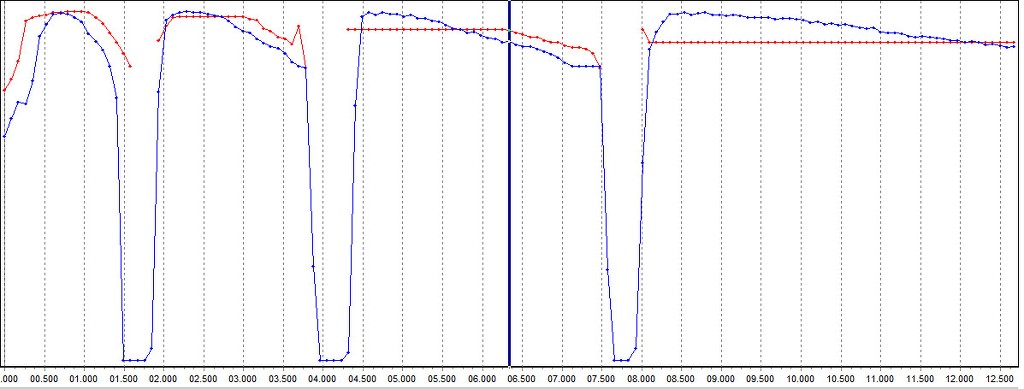
Se vede cum in fiecare viteza, curba rosie este temperata la 424 in a 2-a, 408 a 3-a si 392 a 4-a (RT per gear....grrrrr)... In rest... intr-adevar sta mai sus decat cea albastra.
(Evident ca o simteam ca tragea continuu in a 3-a si a 4-a... ma simteam ca in troleibuz, cu motor electric).
Sper sa am timp maine sa fac teste cu RT per gear scos din drum ( 500 all over

).
Ah... Vali, FFS-ul nu era ok pana acum pentru ca Gear Ratios definite default de Merp erau pentru modelul anterior. Am pus valorile noastre, lasat pe automat... mult mai bine - dar tot nu asa de bine ca la tinywrex...
LATER EDIT: VDC off si la albastru si la rosu
 1561 Replies
1561 Replies 359757 Views
359757 Views